

Метод оценки точности автоматических измерений весовых параметров автотранспортных средств при максимальных скоростях и осевых нагрузках
М.В. Сенянский,
С.И. Гавриленков
Метод оценки точности автоматических измерений весовых параметров
автотранспортных средств при максимальных скоростях и осевых нагрузках
Введение
Автоматический весовой и габаритный контроль большегрузных АТС в настоящее время широко используется во многих регионах страны. В рамках национального проекта «Безопасные и качественные дороги» (БКД) с целью предотвращения разрушения дорожного покрытия большегрузными автомобилями, движущимися по дорогам с превышением весогабаритных параметров, в России построены и успешно функционируют сотни автоматических постов весогабаритного контроля (АПВГК). Требования к техническим и метрологическим характеристикам таких постов, относящихся к сфере государственного регулирования обеспечения единства измерений, оговорены в приказах профильных министров [1].
Погрешность измерения весовых и габаритных параметров нормируется в широком диапазоне скоростей (от 20 до 140 км/ч) и осевых нагрузок (от 1,5 до 20 т на ось). В процессе испытаний АПВГК с целью утверждения типа, при первичной и периодической поверках всегда возникает проблема воспроизведения значений, приближенных к наибольшим пределам измерений без превышения действующих на дорогах ограничений скоростного режима и нагрузок на ось [2].
В данной статье обосновывается новый метод и устройство эквивалентного динамического воздействия для оценки погрешностей измерения весовых параметров АПВГК при максимальных скоростях движения и осевых нагрузках без использования перегруженных АТС и нарушения ПДД по скорости.
Метод эквивалентного воздействия
Подавляющее большинство АПВГК во всем мире использует для измерения осевых нагрузок АТС линейные пьезоэлектрические или тензометрические датчики, иногда называемые силоприемными модулями (СМ). Модуль представляет собой измерительный брус квадратного сечения, монолитно встроенный в дорожное полотно заподлицо с его поверхностью перпендикулярно направлению движения автомобиля (рис. 1).

Рис.1. Силоприемные модули АО «ВИК «Тензо-М»
Длина пятна контакта шины грузовика с дорожным покрытием в 2-4 раза превышает размер стороны квадрата поперечного сечения СМ. В этой связи, сила, действующая со стороны колеса на дорогу (колесная нагрузка), может быть определена только путем интегрирования элементарных сил давления по площади пятна контакта, измеряемых в процессе проезда автомобиля через модуль:
где LƩ - путь интегрирования LƩ = LK + BCM; LK – длина пятна контакта; BCM – ширина силоприемного модуля; pсм(l) - элементарная сила давления, измеряемая за один отсчет.
Форма измеряемого сигнала – колоколообразная (рис. 2).
Рис.2. Форма сигнала при проезде колеса через силоприемный модуль
Ширина основания «колокольчика» равна сумме длины пятна контакта колеса и ширины датчика. В зависимости от диаметра колеса грузовика, конструкции шины и давления воздуха в ней, величины колесной нагрузки и скорости движения, длина пятна контакта изменяется в пределах от 0,15 до 0,35 м. При ширине модуля 60 мм и средней длине пятна контакта, основание «колокольчика» составит около 0,3 м. Высота «колокольчика» равна примерно четверти от величины колесной нагрузки, а также зависит от параметра скатности (числа шин на оси).
Время проезда этого измерительного отрезка пути, например, при скорости 140 км/ч, составляет всего 8 мс! Для интегрирования получаемой при такой скорости пиковой колоколообразной кривой с необходимой точностью требуется сделать порядка 100 отсчетов. Поэтому частота опроса используемой в комплекте с силоприемным модулем вторичной аппаратуры должна быть не менее 12 кГц.
На рис. 3. в координатах «скорость – осевая нагрузка» очерчена область измерения весовых и габаритных параметров большегрузных АТС на автоматических постах согласно приказу [1] Минтранса РФ (прямоугольник 1).
Рис.3. Области измерения весогабаритных параметров АТС. Область 1 – скорость 20… 140 км/ч, нагрузка на ось 1,5… 20 т [1];
Область 2 – без нарушения ПДД, скорость 5… 90 км/ч, нагрузка на ось 1,5… 12 т;
Область 3 – легковых АТС и фургоны, скорость 5… 150 км/ч, нагрузка на ось 1… 3,5 т;
Область 4 – прицепы типа ЭДОН, скорость 1… 70 км/ч, нагрузка на ось 1,5… 20 т;
Область 5 – УДН, скорость 50… 200 км/ч, нагрузка на ось 1… 35 т
При проведении испытаний с целью утверждения типа, при первичных и периодических поверках, необходимо проверять метрологические характеристики АПВГК при всех возможных сочетаниях скоростей и нагрузок, в том числе, вблизи их крайних значений. Вследствие того, что на дорогах общего пользования разрешенная скорость движения АТС, как правило, равна 70… 90 км/ч, а ограничения по осевым нагрузкам составляют от 6 до 11,5 т, осуществить это требование без нарушений действующих норм и правил практически невозможно.
На специальных автополигонах при испытаниях средств измерений с целью утверждения типа, после отключения заводских ограничителей скорости, устанавливаемых на каждом грузовом АТС, удавалось разгонять их до 130… 140 км/ч! Однако, осевые нагрузки свыше 12 т, во избежание порчи дорожного покрытия испытательных трасс, воспроизвести не получилось. Прямоугольник 2 на рис. 3 очерчивает область осевых нагрузок и скоростей «средние скорости – средние нагрузки», в которой поверка и калибровка АПВГК может выполняться без нарушений ПДД и руководств по эксплуатации автомобилей.
С помощью автомобилей и фургонов общей массой до 3,5 т, а также более тяжелых малых двухосных грузовиков может быть «закрыта» область 3, которую можно назвать «большие скорости – малые нагрузки». При этом, нельзя избежать нарушений ПДД по скорости, что, в порядке исключения возможно, при условии временного перекрытия ГИБДД движения по измерительному участку дороги. И, наконец, посредством использования специальных эталонных прицепов с так называемыми «осями-ленивцами», или догружаемых гирями непосредственно вблизи АПВГК, может быть «закрыта» область 4 – «все нагрузки – малые скорости».
Таким образом, для обеспечения проверки метрологических характеристик автоматического поста при всех возможных сочетаниях нагрузок и скоростей, попадающих в зону 1, остается воспроизвести воздействие на встроенные в дорогу силоприемные модули, имеющее место при сочетании максимальных осевых нагрузок и максимальных скоростей «большие скорости – большие нагрузки» – зона 5. Вследствие создания реальных угроз возникновения автомобильных аварий и порчи дорожного покрытия, выполнить такие проезды практически не представляется возможным.
Учитывая сказанное выше, для проверки характеристик АПВГК в прямоугольнике 5 диаграммы – «большие скорости – большие нагрузки», изображенной на рис. 3, нами был разработан метод эквивалентного воздействия (МЭВ). Суть его состоит в формировании силового воздействия на СМ в форме того же «колокольчика», позволяющего определить его метрологические характеристики при динамическом нагружении с временем и амплитудой, соответствующими проездам колес реальных АТС. Метод включает в себя проведение физического эксперимента с использованием разработанного устройства динамического нагружения (УДН), его математическую обработку и определение пределов динамической составляющей погрешности измерений, вызванной большой скоростью изменения нагрузки.
Преимуществом тензометрических датчиков перед пьезоэлектрическими является то, что они позволяют произвести статическую калибровку измерительных каналов «СМ – Дорога – Контроллер» (СМ – Д – К) наложением поверенных гирь, например, класса М1 по ГОСТ OIML R-111-1-2009, создающих силовое воздействие во всем диапазоне осевых нагрузок. Этот шаг является важным, поскольку дает возможность оценить совершенство не только СМ, но и дорожного покрытия, являющегося его основанием. Статическая точность канала может быть оценена, в том числе, и согласно Рекомендациям МОЗМ R 60 или МОЗМ R 76-1 [3], [4]. Далее, согласно методике поверки АПВГК, производится прокат требуемого набора АТС с разными колесными формулами, а также варьированием величин скоростей и осевых нагрузок в пределах сочетаний параметров, очерченных границами зон 2, 3 и 4 (рис. 3).
Для комбинаций скорости и осевых нагрузок, которые не могут быть физически воспроизведены на объекте без нарушений текущего законодательства РФ (зона 5 на рис. 3), соответствие заявленным метрологическим параметрам устанавливается с использованием идентифицированной математической модели измерительного канала СМ – Д – К. Динамические характеристики канала определяются экспериментально.
К сожалению, в области динамических метрологических характеристик измерителей силы и массы пока нет еще, ставших в последние десятилетия привычными для нас – россиян, рекомендаций МОЗМ с «просвещенного запада» таких, например, как R 134 [5] или десяток аналогичных, которые надо было бы просто перевести с английского и принять в качестве межгосударственного стандарта. Потому, что «запад», в большинстве случаев, и сам не часто сталкивается с задачей оценки динамических погрешностей измерения сил. В основном, в процессах оценки характеристик прочности и выносливости материалов при циклических нагрузках, т.е. в области, не требующей особо точных измерений. Сложившаяся практика такова, что даже эталонные силоизмерительные датчики современных испытательных машин от лучших мировых производителей для динамических испытаний, калибруются и поверяются в статике. То есть, по умолчанию считается, что никаких динамических погрешностей в тех диапазонах частот нагружения, при которых проводятся испытания материалов и конструкций, как бы и нет.
К счастью для нас, у ряда российских ученых есть «порох в пороховницах» и они уже опубликовали результаты своих исследований в области метрологии измерения быстроизменяющихся сил [6]. Поскольку наш измерительный канал представляет собой систему из работающих в области упругих деформаций тензорезисторных датчиков, демпфируемую материалами дорожного покрытия, в которое она «замурована», его математическая модель может быть представлена колебательным звеном со следующей передаточной характеристикой [7]:
где k – статический коэффициент передачи; ζ – относительный коэффициент демпфирования; первая круговая частота колебаний, рад/с; круговая частота входного сигнала, рад/с.
Этой передаточной характеристике соответствует следующее дифференциальное уравнение:

где Pизм(t) – значение измеренного СМ усилия в момент времени t, кг; PСМ(t) – осевая нагрузка, действующая на СМ в момент времени t, кг.
Поскольку погрешность статических измерений канала, включающего в себя силоприемный модуль, дорожное покрытие и вторичную электронику с программным обеспечением нам известна в результате проведенной калибровки поверенными гирями, то для определения динамической погрешности системы нам необходимо определить коэффициенты ζ и ω. Для определения этих значений передаточной характеристики (2) следует приложить к СМ вертикальный динамический импульс силы с амплитудой и временем воздействия, соответствующими невоспроизводимым сочетаниям (посредством проездов) больших осевых нагрузок и скоростей АТС.
Устройство динамического нагружения
Эквивалентное динамическое нагружение выполняется посредством устройства, в шутку нареченного нашими сотрудниками – «ДЯТЕЛ». Его схема показана на рис. 4. Этот программно-аппаратный комплекс включает в себя приспособление для сброса гири, силоприемное устройство, силоизмерительный датчик и акселерометр. При моделировании проезда АТС с определенной осевой нагрузкой и скоростью, а также длиной пятна контакта и распределением нагрузки внутри него, определение осевой нагрузки производится системой дорожного весового контроля («СВК») по стандартному алгоритму.
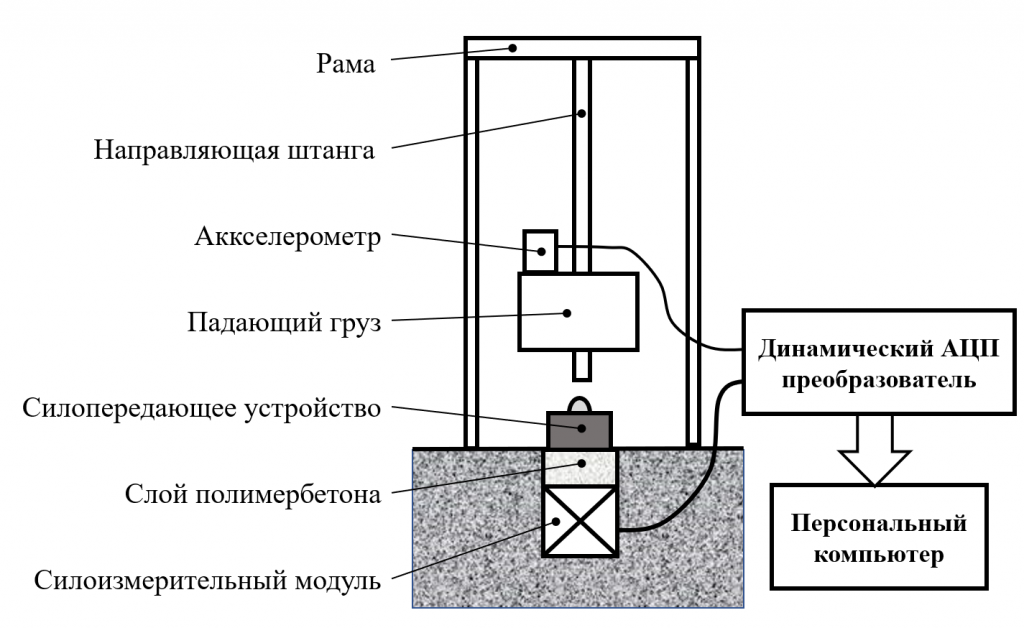
Рис.4. Устройство динамического нагружения УДН
Измеренная кривая элементарных сил давления, проезжающего по силоприемному модулю со скоростью VТС и осевой нагрузкой (ОН) грузовика, позволяет рассчитать длину пятна контакта колеса, участвующего в процессе поверки или испытаний конкретного АТС, с дорожным покрытием:

Требуемое время воздействия динамического импульса, имитирующего проезд этого АТС с большой скоростью, соответствующей правой верхней части прямоугольника 5 (рис. 3), может быть рассчитано следующим образом:

Подбором сочетаний масс падающего груза устройства УДН и высот их падения может быть обеспечена серия динамических силовых воздействий на СМ, имитирующая целую группу проездов АТС с высокими скоростями и значениями осевых нагрузок. Величина пиковой динамической силы, прикладываемой в процессе удара к СМ, определяется как произведение массы груза на его вертикальное ускорение ау, измеренное поверенным и включенным в государственный реестр СИ акселерометром:

Массы падающих грузов определяются с высокой точностью посредством взвешивания на включенных в реестр весах неавтоматического взвешивания. Рассчитывается измеренное значение имитируемой УДН эквивалентной осевой нагрузки (ЭОН) путем интегрирования измеренных СМ значений усилия на отрезке времени проезда t∑:

Ударные воздействия, прежде всего, позволяют не только задать эквивалентную осевую нагрузку с целью определения координат точки внутри зоны 5, но и определить базовые значения относительного коэффициента демпфирования ζ и первой круговой частоты колебаний ω измерительного канала «СМ – Д – К». Они зависят не только от характеристик каждого элемента в отдельности (модуль с силоизмерительными датчиками, контроллер и т.д.), но и от их совместной работы в дорожном покрытии, обладающем, в зависимости от его конструкции, качества и погодных условий, – различными упругими, деформационными и демпфирующими свойствами. Найденные величины этих динамических коэффициентов и позволяют определить предельные динамические погрешности всей системы.
Входной силовой импульс, возбуждающий в СМ затухающие колебания, создается в широком диапазоне амплитуд от 0,1 до 2 т и диапазоне времени воздействия от 2 до 10 мс, что соответствует величинам максимальных осевых нагрузок и скоростей более 30 т и 300 км/ч соответственно (рис. 5).
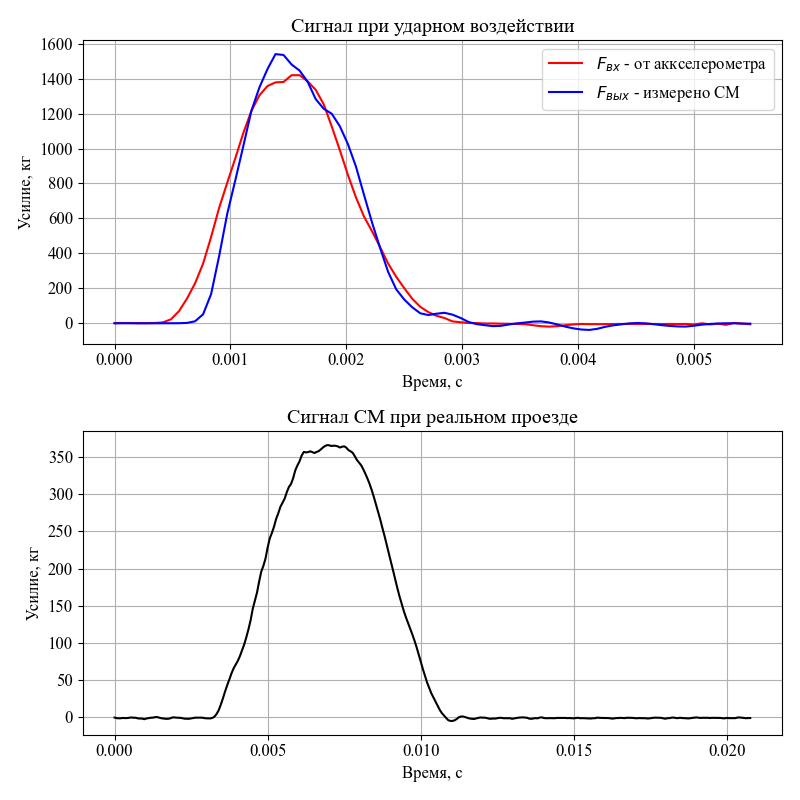
Рис.5. Форма сигнала при нагружении СМ колесом и УДН
Чтобы найти доверительный интервал изменения динамических характеристик испытания проводятся с импульсами разной длительности и амплитуды. При расчете погрешности натурное моделирование производится для разных комбинаций ω и ζ. В результате берется максимальная разность интегралов измеренной и входной сил.
Амплитуда импульса регулируется высотой падения гири, а набор резиновых прокладок позволяет варьировать продолжительность импульса. Акселерометр, измеряющий амплитуду сигнала, обладает постоянным коэффициентом передачи в диапазоне интересующих нас частот от 100 до 1000 Гц.
Оказалось, что устройство может использоваться для решения задачи эквивалентного нагружения в двух следующих основных режимах:
- при времени воздействия, меньшем 2… 3 периодов собственных колебаний СМ, когда возбужденные затухающие колебания могут быть использованы для расчета для расчета ω и ζ;
- при времени воздействия, большем 2… 3 периодов собственных колебаний, когда показания акселерометра используются для иллюстрации квазистатического отклика СМ. В этом случае определение ω и ζ не производится.
С учетом того, что уровень точности малогабаритного пьезоэлектрического эталонного акселерометра УДН на два порядка уступает точности встроенных в СМ силоизмерительных датчиков, определяемый по нему уровень входного усилия корректируется «в запас» на величину его погрешности измерений, равную в нашем случае 3 %.
Метрологические характеристики при крайних скоростях
Рассмотрим пример затухающих колебаний СМ, полученных при помощи УДН, описанного выше (рис. 6).
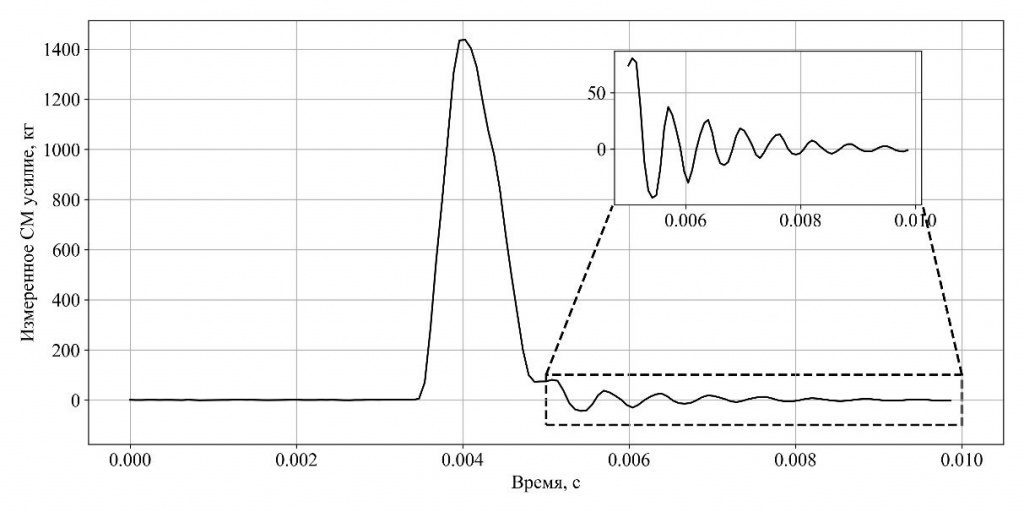
Рис.6. Затухающие колебания СМ при ударном возбуждении, заданном устройством динамического нагружения
Используя приведенные ранее формулы, получаем следующую пару значений ω = 10065 рад/с (1602 Гц) и ζ = 0,06. Многократные ударные нагружения силоприемного модуля вдоль его длины при разных амплитудах и временах воздействия иллюстрируют уровень разброса ω и ζ в пределах ± 20 %. Статическая характеристика СМ при этом линейна.
Высокая частота собственных колебаний СМ свидетельствует о его пригодности для фиксации быстропеременных динамических процессов, имеющих место при автоматических измерениях весовых параметров АТС без торможения транспортного потока. Достигнута она благодаря использованию специально разработанных нами датчиков, работающих на сжатие с минимально возможной вертикальной деформацией под нагрузкой. Применение в конструкции модулей тензорезисторных датчиков типа «консольная балка изгиба», практикуемое одним из иностранных существенно снижает собственную частоту модуля в целом.
Естественно, что модуль деформации асфальтобетона, в который монолитно встраивается СМ, также оказывает существенное влияние на коэффициент демпфирования ζ. Его демпфирующие свойства, как уже показали первые измерения, различаются в разное время года. Поэтому в дальнейшем необходимо будет провести дополнительные эксперименты в летнее и зимнее время года при различных температурах дорожного покрытия. Вполне возможно также, что пара коэффициентов ω и ζ будет принимать существенно отличающиеся значения на разных АПВГК, установленных на дорожном покрытии и основаниях, выполненных из разных материалов.
Для любых скоростей и осевых нагрузок АТС предельная погрешность измерения будет складываться из статической и динамической составляющих:

Естественно, что наибольшую величину динамической составляющей погрешности следует ожидать при максимальном темпе нарастания нагрузки на силоприемный модуль, который возможен только при сочетании наивысшей скорости движения АТС и прямоугольной формы эпюры сил давления колеса на дорожное покрытие. Такая форма возможна лишь гипотетически. Однако, только в этом случае мы сможем оценить величину верхнего предела динамической составляющей погрешности (рис. 7). Прямоугольная эпюра сил давления формирует трапециевидную форму кривой сигнала, измеряемого СМ.
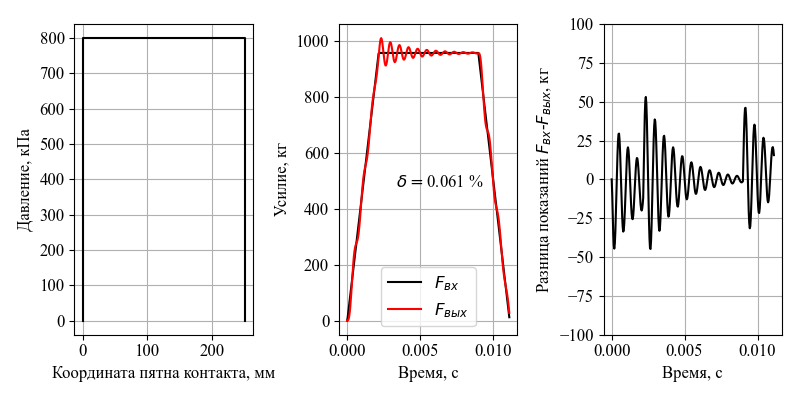
Рис.7. Динамическая составляющая погрешности при прямоугольном распределении давления колеса на асфальт (скорость 100 км/ч)
Реальный мгновенный сигнал, получаемый на выходе канала с указанными выше динамическим коэффициентами ω и ζ, «недотягивает» или превышает трапецию в пределах ± 60 кг. Однако благодаря тому, что осевая или колесная нагрузка вычисляется как интеграл по сотне и более мгновенных замеров (1), в рассматриваемом случае предельная динамическая составляющая погрешности не превышает 0,1 %! Что касается динамической погрешности измерения при реальных профилях эпюр сил давления [8], то ее величина уменьшается на порядок (рис. 8)!
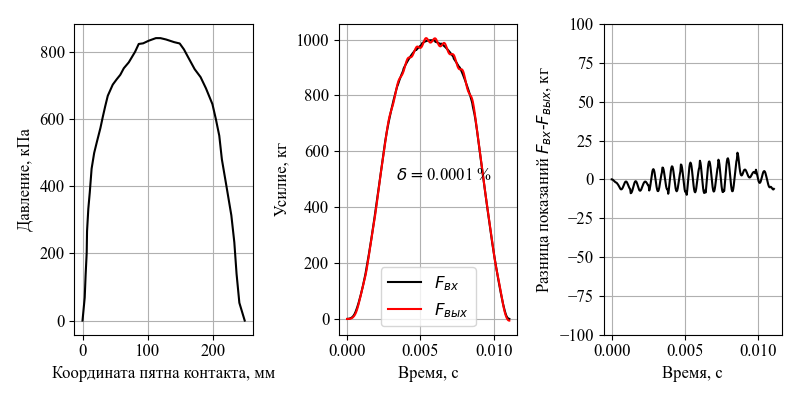
Рис.8. Динамическая составляющая при экспериментально определенном распределении сил давления [8], близком к параболическому (скорость 100 км/ч)
Таким образом, даже при очень больших скоростях движения АТС (140 км/ч и выше) и с учетом возможной вариации пары коэффициентов ω и ζ на дорожных покрытиях разного качества в пределах порядка ± 20 %, мы не наблюдаем традиционно ожидаемых больших погрешностей измерения осевых нагрузок и, соответственно, полной массы (рис. 9).
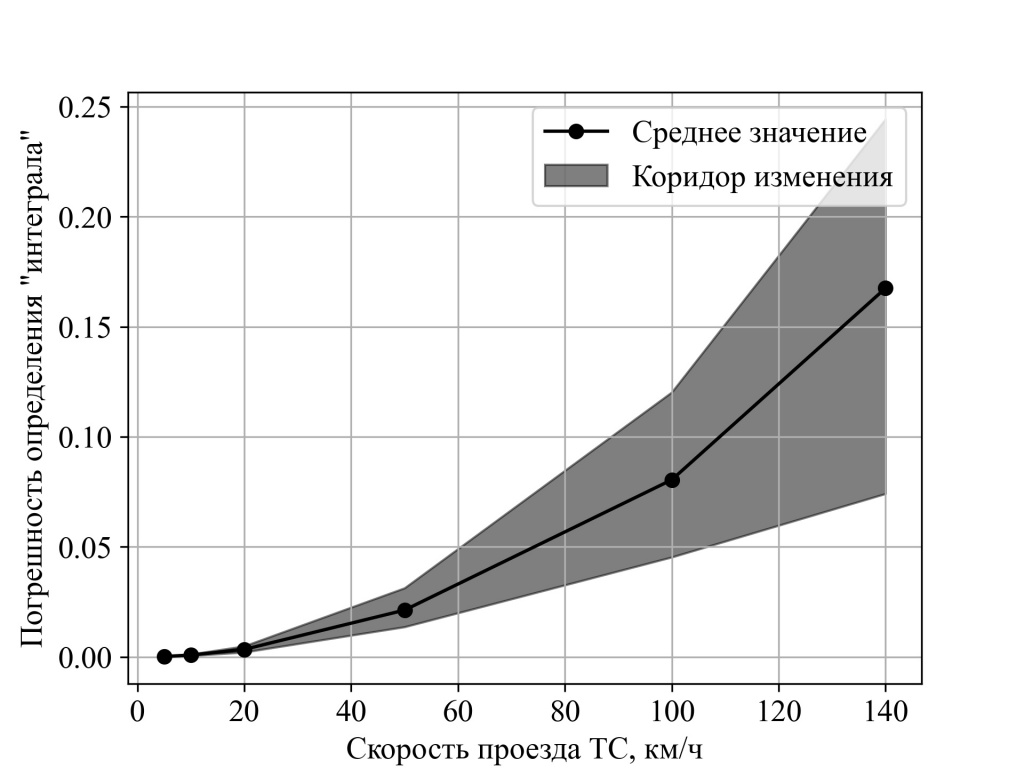
Рис.9. Максимальная величина динамической составляющей погрешности и интервал ее изменения при вариации коэффициента демпфирования и
собственной частоты канала в пределах ± 20 %.
Более того, оказывается, что статический член в формуле (8), существенно больше динамического! Статическая ошибка измерительного канала СМ – Д – К, оцененная по результатам нагружения гирями класса М1 стандартным способом, например, равна ± 50 кг. По отношению к измеряемой величине осевой нагрузки, скажем, 8 т, относительная погрешность составит 0,6 %, а суммарная ошибка измерения в движении не превысит (0,6 + 0,25) = 0,85 ≤ 1 %!
Эта величина на целый порядок меньше погрешности измерения осевой нагрузки на АПВГК, требуемой [1]. На первый взгляд, результат кажется трудно объяснимым или даже ошибочным. Однако, пора признать, что это различие является следствием сложившейся за рубежом, а следом и у нас, многолетней практики «не отделять мух от котлет», приписывая автоматическим средствам измерений в качестве погрешности измерений вариацию весовых параметров АТС в процессе движения [9]. Наши исследования показывают, что колебания подрессоренной и неподрессоренной масс, в зависимости от коэффициента продольной ровности дороги IRI, скорости движения, технического состояния автомобиля и манеры вождения, приводят к вариации осевых нагрузок в пределах ± 10 % и более [10], [11].
Предложенный метод эквивалентного воздействия позволяет решить самую трудную и «скользкую» в области автоматических измерений весогабаритных параметров АТС без торможения транспортного потока проблему – испытания и поверка комплексов при крайних скоростях и больших осевых нагрузках. Простота устройства динамического нагружения и прозрачность метода упрощают интегрирование процедуры в состав методик поверки и программ испытаний АПВГК.
Тем более, что сама процедура динамического нагружения встроенных в дорожное покрытие силоприемных модулей имеет некоторое сходство с регулярно используемой дорожниками методикой измерения модуля деформации и отличается меньшей силой удара, а также объектом приложения динамической силы – груз падает не на асфальтобетон, а на силоприемный модуль. Сама «добавка» к методике поверки может выглядеть следующим образом.
«Пробиваем» СМ посредством УДН в 3-5 сечениях, вычисляя каждый раз пару динамических коэффициентов ω и ζ. Выбрав среди них минимальные, рассчитываем верхний предел динамической составляющей погрешности δ дин для прямоугольного распределения давления в пятне контакта. Определяем суммарную погрешность, суммируя ее со статической, найденной в результате нагружения гирями (8). Полученную суммарную погрешность необходимо привязать к паре значений скорости и осевой нагрузки, рассчитываемых по данным проездов контрольных АТС, с использованием формул (4)… (6).
Естественно, что оцененная таким способом погрешность, которую правильно было бы назвать инструментальной, будет существенно ниже привычных цифр, получаемых в процессе традиционных множественных проездов, включающих в себя не столько погрешность средства измерений, сколько вариации весовых параметров АТС. В этой связи методика и средства поверки должны дополняться проездами специального транспортного средства, названного нами эталоном динамических осевых нагрузок (ЭДОН). Осевые нагрузки в нем измеряются встроенными динамометрами высокого класса точности (подрессоренная масса) и акселерометрами (неподрессоренная масса), закрепленными на осях с колесами.
Естественно, что ЭДОН также подлежит испытаниям с целью утверждения типа или аттестации как эталона осевой нагрузки прежде, чем его можно будет использовать при поверке и испытаниях АПВГК. Использование такого эталона, а также предложенного в статье нового метода и устройства эквивалентного динамического воздействия позволит существенно сократить время проведения процедуры поверки за счет отказа от многократных проездов АТС с разными колесными формулами, числом осей и типами подвески!
Заключение
Результаты изложенного в статье экспериментально-теоретического исследования показывают, что предложенные метод и устройство эквивалентного динамического нагружения позволяют оценить границы погрешности измерения осевых нагрузок АПВГК при максимальных скоростях без нарушения ПДД и проката перегруженных АТС и могут быть включены в качестве дополнения в методики поверки этих комплексов.
Список литературы
- Приказ Минтранса РФ от 29 марта 2018 г. за № 119 «Об утверждении порядка осуществления весового и габаритного контроля транспортных средств, в том числе порядка организации пунктов весового и габаритного контроля»
- Постановление Правительства РФ от 15.04.2011 г. № 272 «Об утверждении правил перевозок грузов автомобильным транспортом».
- ГОСТ 8.631-2013 (OIML R 60:2000). Датчики весоизмерительные. Общие технические требования. Методы испытаний.
- ГОСТ OIML R-76-1-2011. Весы неавтоматического действия. Часть 1. Метрологические и технические требования. Испытания.
- ГОСТ 33242-2015 (OIML R 134-1:2006). Весы автоматические для взвешивания транспортных средств в движении и измерения нагрузок на оси. Метрологические и технические требования. Испытания.
- A.R. Gorbushin, A.A. Bolshakova. Unsteady axial force measurement by the strain gauge balance, Measurement, Volume 152, 2020, 107381
- Бесекерский В.А., Попов Е.П. Теория автоматического управления. Санкт-Петербург: Издательство Профессия, 2003. 200 с.
- Leiva-Villacorta F. et al. Influence of Tire Footprint Area and Pressure Distribution on Pavement Responses // Roles Accel. Pavement Test. Pavement Sustain. Eng. Environ. Econ. Springer, Cham, 2016. P. 685–700.
- Сенянский М. В. Практика и вопросы метрологии работы автоматических постов весового и габаритного контроля автотранспорта //Приборы – 2019 – № 1 – с. 17-23.
- Гавриленков С.И., Гаврюшин С.С., Жуков С.Л. и Сенянский М.В. Влияние режимов движения АТС и характеристик дорожного покрытия на результаты измерения их весогабаритных параметров. Приборы 2020, № 1.
- Сенянский М.В. Методологические особенности поосного взвешивания автомобилей. Журнал «Законодательная и прикладная метрология» № 1, 2013 г.