

Влияние режимов движения АТС и характеристик дорожного покрытия на результаты автоматического измерения их весогабаритных параметров
Гавриленков С. И.,
Гаврюшин С.С.,
Жуков С.Л.,
Сенянский М.В.
ВЛИЯНИЕ РЕЖИМОВ ДВИЖЕНИЯ АТС И ХАРАКТЕРИСТИК ДОРОЖНОГО ПОКРЫТИЯ НА РЕЗУЛЬТАТЫ
АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ ИХ ВЕСОГАБАРИТНЫХ ПАРАМЕТРОВ
ВВЕДЕНИЕ
В сложившейся мировой практике внедрения HS WIM – автоматических систем весогабаритных измерений в движении на большой скорости – не принято отделять погрешность средства измерений (АПВГК – автоматического поста весогабаритного контроля) от динамических вариаций самих измеряемых параметров грузовых автотранспортных средств (АТС). Тот факт, что величины измеряемых динамических осевых нагрузок и габаритных размеров в процессе движения АТС непрерывно меняются относительно их значений, измеренных в статике, до самого последнего времени не упоминался ни иностранными, ни отечественными специалистами.
В прошлой публикации [1] уже отмечалось, что вариации измеряемых весогабаритных параметров АТС могут превышать погрешности АПВГК и это следует учитывать при проведении испытаний и поверок этих средств измерений, а также вынесении судебных решений относительно потенциальных нарушителей. В данной статье приводятся новые результаты расчетно-экспериментальных исследований изменения весогабаритных параметров АТС при помощи динамической модели с 4 степенями свободы и прямых измерений вертикальных ускорений подрессоренной массы двухосного грузовика в процессе движения по неровной дороге. Индекс продольной ровности дороги (IRI) задается по стандарту ISO 8068 [2]. Моделируется и влияние продольного ускорения АТС на величины его динамических осевых нагрузок.
В качестве объекта исследования использовался серийный двухосный бортовой грузовик МАЗ 53366 (рис.1). Параметры модели, к которым относятся жесткость рессор и шин передней и задней осей, определялись посредством нагружения кузова эталонными гирями с одновременным измерением осевых нагрузок подкладными автомобильными весами и вертикальных ходов подвески и деформации шин.
Как и следовало ожидать, математические ожидания осевых нагрузок стремятся к величинам, измеренным в статике, а размах колебаний осевых нагрузок зависит от качества дороги, скорости АТС, соотношения подрессоренной и неподрессоренной масс. При разгоне или торможении наблюдается динамическое перераспределение нагрузок между передней и задней осями с «галопированием» автомобиля. Полученные расчетные результаты согласуются с данными других исследователей [3, 4] и результатами измерений вертикальных ускорений частей подрессоренной массы, приходящихся на оси.
Предлагается продолжить расчетные и экспериментальные исследования динамических осевых нагрузок АТС других колесных формул с разными типами подвесок и грузами, включая жидкие и легкосыпучие. Делается вывод о необходимости увеличения нештрафуемых порогов превышений весовых и габаритных параметров АТС, автоматически измеряемых АПВГК. Предлагается усовершенствовать процедуры оценки точности автоматических постов измерения весогабаритных параметров посредством эталона динамической осевой нагрузки (ЭДОН) и отразить их в проекте будущего государственного стандарта на АПВГК. Кроме того, необходима разработка рекомендаций по правильной загрузке АТС для перевозчиков, гарантирующей проезд автоматических постов без нарушения действующих норм.

Рис.1. Двухосный грузовик МАЗ 53366 на рессорной подвеске
1. ЦЕЛИ И СРЕДСТВА ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ
Многолетняя мировая практика взвешивания движущихся объектов, являющихся в подавляющем большинстве случаев, средствами транспорта (автомобили и вагоны) обобщена в международных рекомендация МОЗМ [5, 6]. Целью таких измерений является товарное или коммерческое взвешивание в целях осуществления денежных расчетов между поставщиками и потребителями. Измерения в движении позволяют существенно увеличить производительность процессов товарного перевешивания больших масс. Вследствие того, что взвешиваемые вагоны и автомобили подвержены воздействию переменных во времени инерционных, ветровых, тяговых, тормозных и других воздействий, точность динамических измерений априори всегда ниже, чем статических.
Интересным, с точки зрения метрологии, примером является процесс взвешивания животных. Такой процесс взвешивания только с определенной натяжкой можно назвать статическим. В данном случае животное, например, корова ведет себя неспокойно и, топчась и прыгая, прикладывает к платформе весов через копыта переменные вертикальные силы импульсного характера. Поэтому процесс взвешивания можно также считать и динамическим – взвешиванием непрерывно перемещающегося в пространстве объекта (рис.2). Разница с вагонными или автомобильными весами состоит лишь в том, что корова не покидает пределов грузоприемной платформы. Это позволяет провести множественные измерения, среднее которых может быть как угодно близким к ее истинной массе. Все зависит от времени наблюдения и числа замеров.
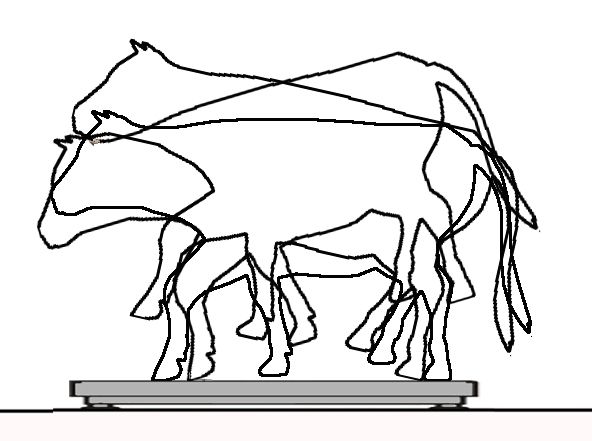
Рис.2. Взвешивание животного на платформенных весах в режиме «танцующая корова»
В платформенных весах «Тензо-М», предназначенных для взвешивания скота, этот алгоритм запрограммирован в весовом терминале под романтичным названием «танцующая корова» [7]. Он позволяет достичь точности, характеризуемой числом делений n = 1000…2000 [8]. Однако, пробегающего через весы корову, что, с метрологической точки зрения, более приближено к процессу автоматического взвешивания АТС, взвесить с такой точностью невозможно. Скорее всего, не удастся достичь даже грубых классов точности, оговоренных [5] для автоматических весов. Так как заставить корову многократно бегать через весы невозможно, то статистику набрать не удастся, а импульсные силы от ударов копыт по грузоприемной платформе могут существенно отличаться от статических (рис.3).
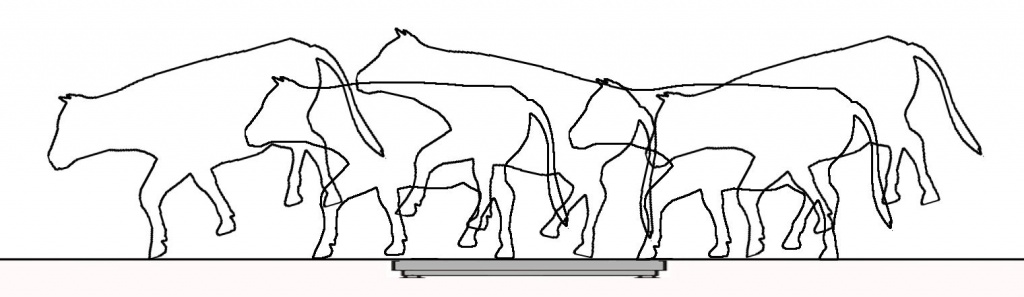
Рис.3. Взвешивание животного в режиме «пробегающая через весы корова» напоминает автоматический весовой контроль АТС
Взвешиваемые в движении автомобили и вагоны, как объекты измерения, в большой степени похожи на пробегающую через платформенные весы корову. С одной стороны, вследствие того, что они постоянно находятся в колебательном процессе, сила воздействия их колес на весы изменяется во времени и пространстве. С другой, мы не можем заставить их проехать через весы необходимое число раз для набора статистики и вычисления средних значений осевых нагрузок и полной массы, с целью получения погрешностей, приближенных к погрешностям статического взвешивания. Амплитуда, характер и частоты колебаний АТС зависят как от его конструкции и колесной формулы, скорости движения, так и от ровности дорожного покрытия.
Чтобы как можно точнее осуществлять товарное взвешивание в движении и получить погрешность, например ± 0,5%, подъездные пути вагонных весов стараются сделать идеально ровными и горизонтальными, без стыков и кривых, протягивать состав без рывков и торможений с постоянной скоростью, использовать исправный подвижной состав и т.д. Из-за больших потоков перевозимых грузов, другого выхода, как только взвешивать в движении, на железной дороге, чаще всего, нет!
В отличие от железных дорог, на автомобильных дорогах товарное взвешивание автомобилей, как правило, не производится. Для этого существуют полноразмерные статические автомобильные весы у грузоотправителей и грузополучателей. Взвешивание, а точнее измерение осевых нагрузок и полной массы АТС в полосе движения без торможения транспортного потока, осуществляется в других целях – для весового контроля. Государственные контролирующие структуры – Ространснадзор, МВД, а также эксплуатирующие дороги организации хотят предотвратить разрушение покрытия перегруженными грузовыми автомобилями. Задачей таких измерений является лишь сравнение осевых нагрузок и полной массы АТС с нормативными значениями, опубликованными в постановлении Правительства [9].
Указанные параметры АТС измеряются в движении в широком диапазоне скоростей от 5 до 140 км/ч. Результаты измерения отражают их в состоянии «как они есть» в момент измерений. И, несмотря на то, что качество дорожного покрытия на измерительном участке трассы соответствует жестким требованиям Минтранса [10], различие измеренных в движении величин осевых нагрузок и полной массы, и их статических значений может превышать декларируемые государством требования. К сожалению, большинство участников процессов автоматического весового контроля, к которым относятся перевозчики, контролирующие структуры, производители и инсталляторы АПВГК, и даже метрологи, сертифицирующие их как средства измерений или измерительные системы, не полностью понимают это!
2. ДИНАМИЧЕСКАЯ МОДЕЛЬ И ВАРИАЦИИ ВЕСОГАБАРИТНЫХ ПАРАМЕТРОВ АТС
Для моделирования влияния режимов движения и параметров АТС на величины динамических осевых нагрузок (ДОН) используется динамическая модель автомобиля, имеющая 4 степени свободы - вертикальные перемещения центра подрессоренной массы, неподрессоренных масс передней и задней осей, а также угол поворота кузова вокруг центра масс.
Динамика продольного движения АТС - ускорение или замедление - моделировалась путем приложения внешнего момента, действующего на кузов (рис.4). Используемая модель основана на динамической модели автомобиля приведенной в [3]. Входными воздействиями являлись высота дорожного профиля под передней и задней осями, скорость движения, а также момент, вызванный разгоном или торможением АТС. Модель строилась на базе следующих четырех дифференциальных уравнений:
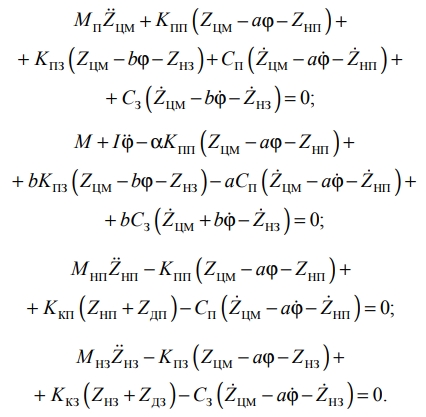
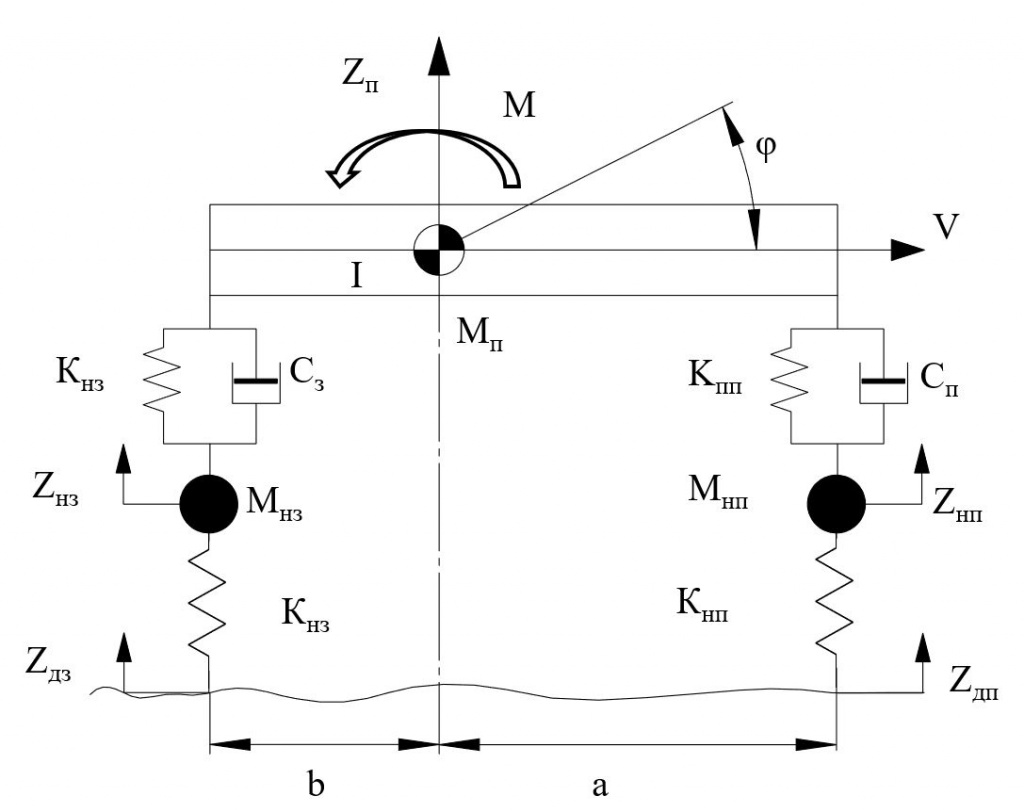
Рис.4. Динамическая модель двухосного АТС с 4 степенями свободы
Дорожный профиль генерировался по алгоритму [4]. Параметры функции генерации подбирались таким образом, чтобы индекс ровности профиля (International Roughness Index - IRI), определенный по ГОСТ 33101-2014, соответствовал требуемому значению. Одним из ключевых значений было IRI = 1,7 м/км для участка дорожного покрытия протяженностью 200 метров до места монтажа АПВГК, декларируемое, например, Руководством по эксплуатации одной из наиболее используемых в настоящее время, систем автоматического весового и габаритного контроля.
Оценка вариаций измеряемых параметров АТС выполнялась по следующей методике. Вначале генерировался профиль участка дорожного покрытия с требуемым IRI, который служил входным воздействием при моделировании подвески в части определения динамических нагрузок передней и задней осей, и габаритных размеров АТС (рис.5). С учетом того, что использовалась плоская, так называемая, «велосипедная» модель грузовика, в первом приближении изменение габаритной высоты можно было заменить вариацией вертикальной координаты центра подрессоренных масс.
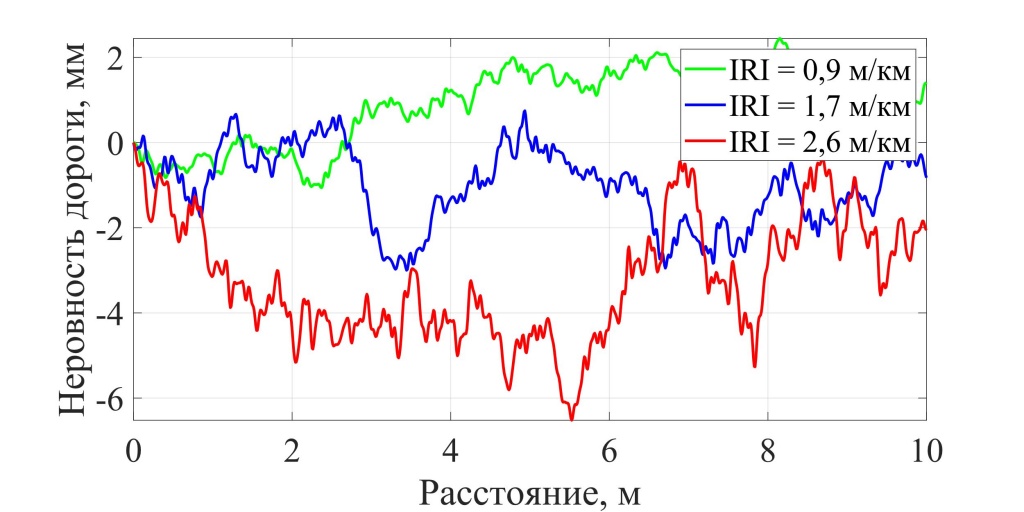
Рис.5. Пример синтезирования профиля продольной ровности дороги при крайних и опорном (1,7) значениях коэффициента IRI
Поскольку, в жизни измерение динамических осевых нагрузок производится двумя последовательно врезанными в дорожное полотно силоизмерительными модулями, ДОН каждой оси определялись как полусумма их значений, рассчитанных для сечений дороги с расстоянием в 4 м (рис.6). Объем выборки значений ДОН составлял несколько тысяч реализаций.
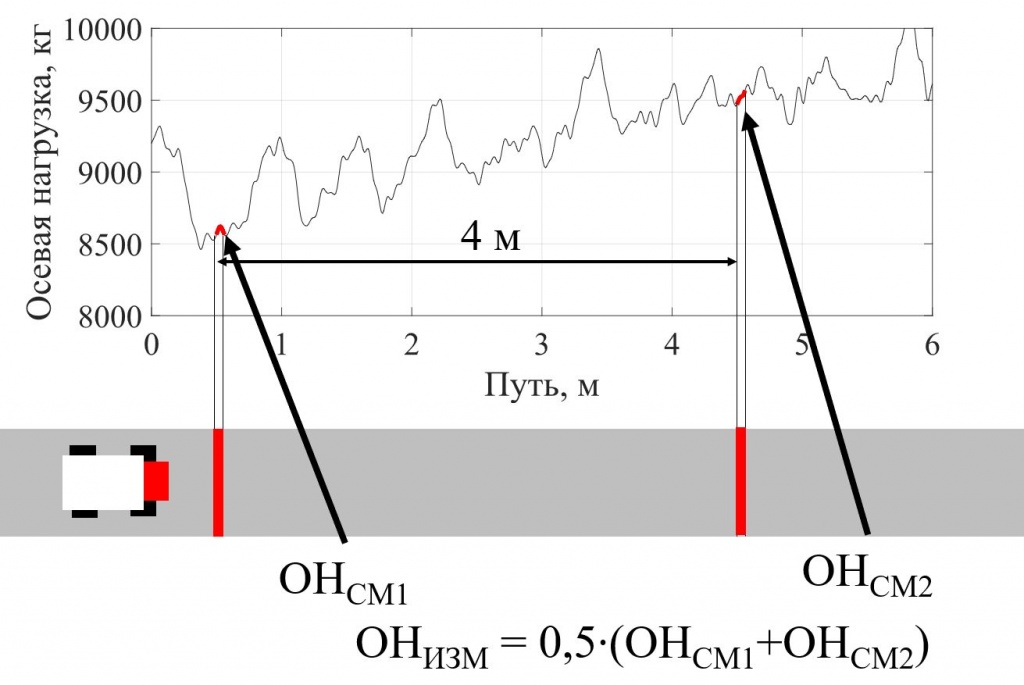
Рис.6. Вычисление осевой нагрузки
Описываемая математическая модель реализована в прикладной программе, написанной на языке Python с использованием математических библиотек для работы с векторами и матрицами (Numpy) и математического моделирования динамических систем в пространстве состояний (Scipy.Signal).
Коэффициенты жесткости рессор передней и задней осей автомобиля МАЗ 53366, а также его шин определялись экспериментально путем нагружения кузова 2-тонными гирями класса М2 по ГОСТ 8.021-2015 с одновременной фиксацией осевых нагрузок двумя парами включенных в государственный реестр средств измерений подкладных автомобильных весов ВА-20П (рис.7). Оказалось, что рессора, являющаяся самым древним амортизирующим элементом подвески колесных транспортных средств, имеет практически линейную характеристику в координатах «нагрузка-прогиб», но обладает лишь минимальными демпфирующими свойствами (рис.8).

Рис.7. Измерение вертикального хода подвески, деформации шины и осевой нагрузки в процессе нагружения кузова гирями
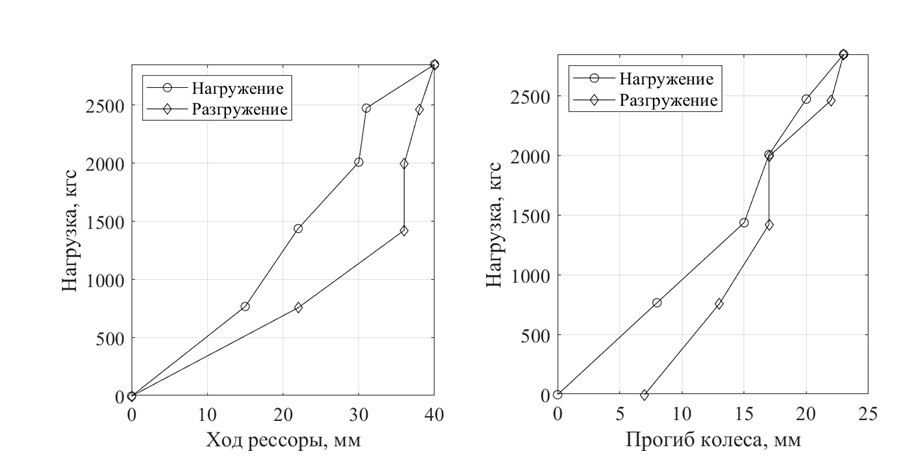
Рис.8. Диаграммы вертикального хода рессоры и деформации шин заднего колеса в процессах нагружения и разгружения
В первом вычислительном эксперименте варьировалось значение IRI от 0,97 м/км до 2,6 м/км, а скорость АТС была постоянна и равна 15 м/c (54 км/ч). Моделирование проводилось для двух величин полной массы – 13 т и 19 т. На рис.9 приведены вариации ДОН и рассчитанной путем их суммирования полной массы (ДПМ), приведенные к средним значениям. Красными линиями обозначены допустимые пределы погрешности измерения согласно Приказу Минтранса [10].
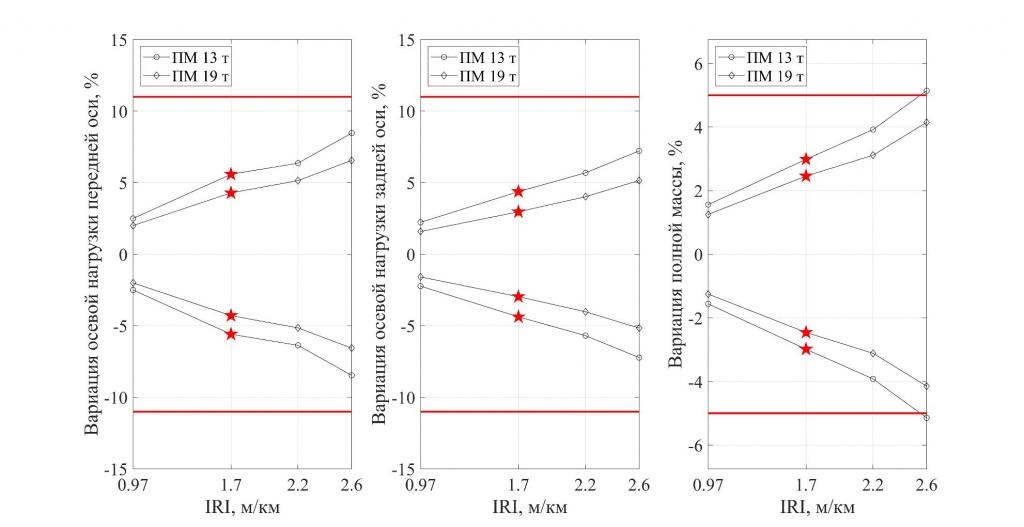
Рис.9. Вариации величин ДОН и полной массы АТС в зависимости от величины индекса продольной ровности дорожного покрытия (скорость 54 км/ч)
Полученные результаты показывают, что с ухудшением качества дорожного покрытия вариации весовых параметров автомобиля растут. В самом крайнем случае, при IRI = 2,6 м/км, что в бытовом понимании может быть охарактеризовано словами «плохая асфальтобетонная дорога», кривая полной массы МАЗ 53366 с массой 13 т, пересекает границу допустимой погрешности 5%! Если в этом случае мы были бы должны измерить полную массу реального грузовика посредством АПВГК, погрешность любого из которых, безусловно, отличается от нуля, и равна, как минимум 2…3 %, то эта полная масса отличалась бы от статической на величину ± 7…8%.
Владелец грузовика, водитель которого перед выездом в рейс загрузил свой автомобиль в точном соответствии с требованиями Постановления Правительства [9] по полной массе и осевым нагрузкам, проверив свой вес на исправных и поверенных полноразмерных автомобильных весах неавтоматического действия, после проезда АПВГК теоретически может получить «письмо счастья за перевес». Из результатов автоматических измерений установленная в ЦАФАП программа вычтет в его пользу значение «официальной погрешности измерения», равной 5 % [10] и «нешфтрафуемые» согласно КоАП 2% перевеса, что в сумме составит 7%. Тем не менее, ему может быть начислен штраф в сумме 150 000 рублей за превышение разрешенной полной массы всего на 1 %! Это примерно 130 кг – вес двух человек, сидящих, например, рядом с водителем! Несправедливо! И неверно с точки зрения метрологии, поскольку погрешность измерения осевых нагрузок АПВГК, равная в последнем случае 3%, не превышает установленных государством пределов, а постановление будет вынесено фактически только за то, что автомобиль в процессе движения по реальной дороге неизбежно колеблется и в какие-то моменты времени его динамические осевые нагрузки и рассчитанная по ним полная масса могут быть меньше или больше статических! Мы рассмотрели крайний случай – очень плохая дорога с твердым покрытием и высоким индексом продольной неровности IRI = 2,6 и автомобиль с рессорной подвеской, наиболее подверженный процессу колебаний подрессоренной и неподрессоренных масс. Можно предположить, что АТС на пневмоподвеске, движущееся по дороге среднего качества, например, с IRI = 1,7, будет иметь меньший диапазон вариаций динамических осевых нагрузок и полной массы. Однако, при увеличении скорости движения с 54 до 72 и более км/ч, вариации снова возрастут и станут соизмеримыми с требуемыми и декларируемыми Приказом Минтранса величинами (рис.10). У рассматриваемого МАЗ 53366 задняя подвеска состоит только из листовых рессор, а передняя подвеска состоит из листовых рессор и демпфера. Благодаря этому, коэффициент демпфирования передней подвески выше.
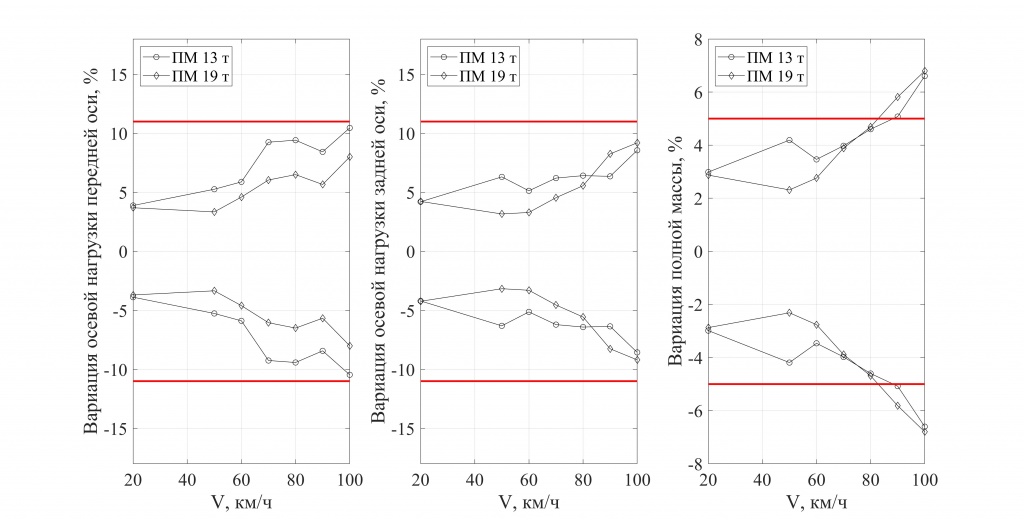
Рис.10. Вариации осевых нагрузок и полной массы, в зависимости от скорости движения АТС, при IRI = 1,7
Рассмотренные результаты моделирования показывают, что погрешность результата измерений АПВГК складывается из двух составляющих одного порядка величин – вариаций самих измеряемых параметров, например осевая нагрузка и высота АТС, и инструментальной погрешности самого средства измерений.
Во избежание штрафования законопослушных водителей, придерживающихся при погрузке норм, оговоренных [9] и [10], весогабаритные параметры которых в процессе автоматических измерений могут, тем не менее, немного превышать их в силу указанных выше причин, приводящих к вариации параметров самих АТС, необходимо расширить «нештрафуемый порог» по осевым нагрузкам и полной массе с 2% до 10%.
Результаты многочисленных первичных и периодических поверок АПВГК, как правило, свидетельствуют, что погрешности результатов измерений, по старинке понимаемые большинством профессионалов, как погрешность средства измерений, укладываются в требуемые пределы 11 и 5% для осевых нагрузок и полной массы, соответственно. Это говорит о том, что погрешность средства измерений существенно ниже и, видимо, не превосходит и половины указанных выше величин. Для контроля метрологических характеристик АПВГК следует создать и аттестовать эталон динамической осевой нагрузки (ЭДОН), воспроизводящий ее с высокой точностью непосредственно в тот момент, когда колеса оси находятся на врезанном в асфальтобетон силоизмерительном модуле (рис. 11).

Рис.11. Эталон динамической осевой нагрузки ЭДОН с набором эталонных грузов
В третьем вычислительном эксперименте моделировалось воздействие момента, вызванного слабым торможением (-1 м/с2). Измеряемое значение динамической полной массы не меняется (рис. 12). При торможении происходит перенос части нагрузки с задней оси на переднюю в пределах 5…7%. Обнаруживаемая разница статических и автоматически измеренных динамических значений осевых нагрузок часто трактуется как некорректное измерение весовых параметров в движении. И мало кто понимает, что разница обусловлена только изменением самих измеряемых величин вследствие действия законов динамики и никакого отношения к погрешности измерения не имеет!
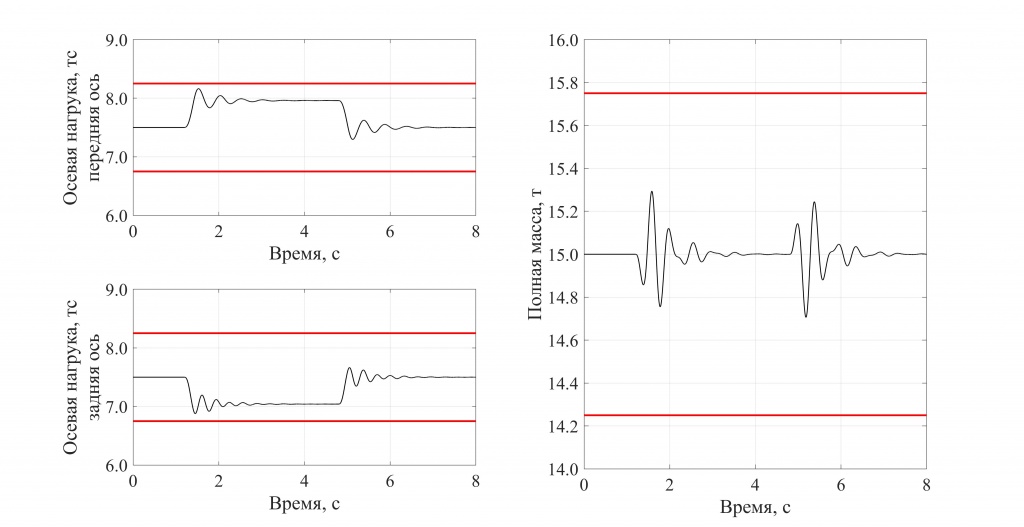
Рис.12. Динамические осевые нагрузки при слабом торможении и рассчитанная их суммированием полная масса
Как правило, этим приемом пользуются опытные водители, пытаясь таким маневром разгрузить наиболее нагруженную, как правило, вторую ось седельного тягача, чтобы избежать штрафа. При небольшой величине перегруза это часто помогает.
Следует иметь в виду, что несмотря на серьезный методический подход к моделированию и корректное экспериментальное определение влияющих на поведение автомобиля констант, полученные результаты следует считать предварительными, требующих уточнения силами специалистов и ученых профильных НИИ Минтранса, а также охвата более широкой выборки АТС с разными колесными формулами и типами подвески. Тем не менее, выявленные закономерности позволяют подтвердить сделанный ранее вывод о том, что погрешность результата автоматического измерения весогабаритных параметров АТС на АПВГК зависит не только от метрологических характеристик используемых средств измерений, но и от конструкции и технического состояния автомобиля, параметров и характера его движения, таких как скорость, ускорение, а также продольной ровности дорожного покрытия.
Колебания АТС приводят не только к искажению результатов автоматических измерения осевых нагрузок и полной массы. В не меньшей степени это относится и к габаритным размерам – высоте, ширине и длине. Оказывается, размах вертикальных колебаний центра масс рассматриваемого грузовика при движении со скоростью 54 км/ч по плохой дороге с твердым покрытием (IRI = 2,6) составляет 6…7 см! (рис.13). Поскольку автомобиль находится в сложном многопараметрическом колебательном процессе, включая галопирование (возвратно-вращательное движение в продольной плоскости) и колебания по крену, амплитуда колебаний задней части кузова будет существенно выше, чем центра масс, приближаясь или даже превосходя требуемые Приказом Минтранса [10] значения предельных погрешностей, равные ± 10 см!
Таким образом, и в случае автоматического измерения габаритных размеров АТС необходимо ввести «нештрафуемые пороги» превышения нормативных габаритных размеров. Накопленная в разных регионах страны статистика показывает, что по ширине, высоте и длине они должны быть не менее ± 20 см и ±1м соответственно!
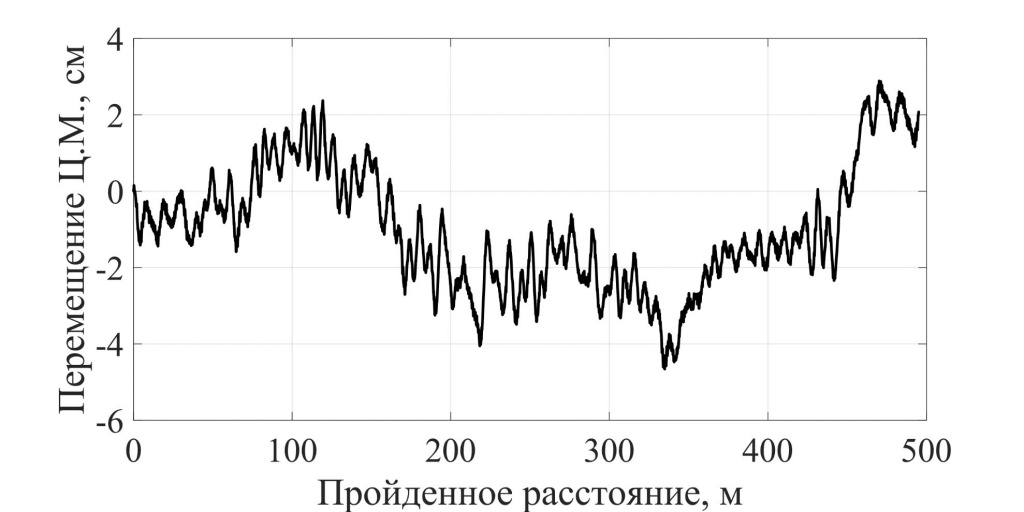
Рис.13. Вертикальное перемещение центра масс грузовика МАЗ 53366 при движении по дороге с IRI = 2,6 со скоростью 54 км/ч
ВЫВОДЫ
Вариации измеряемых в процессе автоматического весогабаритного контроля параметров АТС определяются его конструкцией, параметрами движения и состоянием дорожного покрытия. Динамические осевые нагрузки типового двухосного грузовика на рессорной подвеске при его движении со скоростями 50…70 км/ч по дороге с индексом продольной ровности IRI = 1,7 изменяются в пределах от 3 до 9%, а полная масса - от 2,5 до 4%, что приближается к оговоренным Приказами Минтранса и МВД значениям предельных погрешностей измерения этих параметров для АПВГК. Поскольку инструментальные погрешности измерения весогабаритных параметров АТС составляют, как минимум, 2…3%, суммарная погрешность результата измерений в движении может выйти за законодательно требуемые пределы.
Во избежание случаев ошибочного вынесения постановлений о штрафе владельцам АТС, водители которых выезжают в рейс без нарушений, необходимо увеличить «нештрафуемые пороги» фиксируемых АПВГК «превышений» до 10% по осевым нагрузкам и полной массе, а также ввести такие пороги на результаты измерения габаритных размеров. По высоте и ширине не менее ± 20 см, а по длине ± 1 м соответственно! Для обоснования величин этих «порогов», а также разработки рекомендаций по «недогрузу» для перевозчиков, необходимо провести цикл исследований вариаций весовых и габаритных параметров грузовых АТС с разными колесными формулами и типами подвесов силами институтов Минтранса, промышленности и Росстандарта.
Учитывая высокие размеры штрафов «за перегруз» и «негабарит», являющиеся сегодня самыми высокими в мире, а также высокую социальную ответственность за результаты автоматических измерений, считаем необходимым в срочном порядке разработать и ввести в действие ГОСТ на АПВГК, который должен включать в себя не только метрологические и технические требования к ним, типовую методику поверки, но и требования к измерительным и подъездным участкам дорог в местах установки постов.
Для калибровки, поверки и мониторинга характеристик используемых средств измерений необходимо аттестовать прицепы - эталоны динамических осевых нагрузок (ЭДОН), которые позволят избежать затратных по времени и ресурсам, и малоэффективных, с точки зрения метрологии, публичных «покатушек» групп случайно предоставленных перевозчиками автомобилей неопределенного технического состояния. Помимо этого, необходим доступ к массивам данных о проездах многих тысяч АТС на АПВГК, расположенных в разных регионах России, и привлечение институтов Росстандарта для разработки методов непрерывной диагностики их состояния.
Список литературы
1. Сенянский М.В. Практика и вопросы метрологии работы автоматических постов весового и габаритного контроля автотранспорта //Приборы – 2019 – № 1 – с. 17-23.
2. Tyan F. et al. Generation of random road profiles //Journal of Advanced Engineering – 2009 – Т. 4 – № 2 – с. 1373…1378.
3. Sun L. Computer simulation and field measurement of dynamic pavement loading //Mathematics and computers in simulation. – 2001. – Т. 56. – №. 3. – с. 297-313.
4. Lin J. H. Simulation of dynamic vehicle load on road pavement //Vibroengineering PROCEDIA. – 2015. – Т. 5. – с. 503-508
5. ГОСТ 33242-2015. Весы автоматические для взвешивания транспортных средств в движении и измерения нагрузки на оси. Метрологические и технические требования. Испытания.
6. ГОСТ 8.647-2015. Часть 1. Весы вагонные автоматические. Метрологические и технические характеристики. Методы испытаний.
7. Михайлов В.С., Сенянский М.В., Фаворский Д.В. «Корова не на льду». Весы для взвешивания скота. Журнал «Эффективное животноводство», № 6, 2008 г.
8. ГОСТ OIML R 76-1-2011. Весы неавтоматического действия. Часть 1. Метрологические и технические требования. Испытания.
9. Постановление Правительства РФ от 15.04.2011 г. № 272 «Об утверждении правил перевозок грузов автомобильным транспортом».
10. Приказ Минтранса РФ от 29 марта 2018 г. за № 119 «Об утверждении порядка осуществления весового и габаритного контроля транспортных средств, в том числе порядка организации пунктов весового и габаритного контроля.
январь 2020 года
Все права на публикацию принадлежат АО «Весоизмерительная компания «Тензо-М». Перепечатка или использование материалов – только с согласия автора!